Últimamente DOBOT Magician se ha actualizado a V2. ¿Se pregunta las diferencias entre Magician V1 y Magician V2? Aquí hay una comparación de la versión anterior y la nueva, que describe detalladamente las diferencias en apariencia, interfaces de E/S y sensores. No dude en consultar este artículo cada vez que tenga dudas sobre las diferentes versiones de DOBOT Magician.
1.notas
- Cómo diferenciar DOBOT Magician V1 y V2: haga clic en "?" en la interfaz de DobotStudio y verifique la versión del hardware.
- Cómo diferenciar las diferentes versiones de kit de riel lineal, sensor fotoeléctrico y sensor de color: la versión solo se puede identificar por la etiqueta física. Si la etiqueta muestra V2, significa que la versión es V2. Mientras que ninguna etiqueta física en el objeto significa versión V1.
- Si la versión del kit de rieles es V2, debe seleccionar "Nuevo riel" en "Configuración > General" de la interfaz de DobotStudio al controlar el brazo robótico a través de DobotStudio. Si la versión del kit de rieles es V1, deje esta opción sin marcar.
- Los sensores fotoeléctricos y los sensores de color se pueden conectar a múltiples puertos cuando se conectan al brazo del robot. Asegúrese de que los puertos establecidos por Blockly o API estén en correspondencia uno a uno con el puerto de conexión del hardware.
2.Descripción deAapariencia Ddiferencias
2.1SimilarAapariciones deV1 y V2
Las apariencias y los diseños estructurales de V1 y V2 son similares, como se muestra a continuación:

Figura 2.1 - Imagen de representación de Magician V1

Figura 2.2 - Imagen de representación de Magician V2
2.2Cambio de color dev2Puertos
Los puertos de V1 en la base y el antebrazo son todos blancos, mientras que el color de los puertos de V2 se ha cambiado para que sea más conveniente para los usuarios distinguir y evitar operaciones incorrectas. El puerto universal GP es verde y el interruptor de 12 V SW es rojo. El puerto paso a paso es amarillo y el termistor de impresión 3D es azul, como se muestra a continuación:

Figura 2.3 - Cambio de color de los puertos en la base
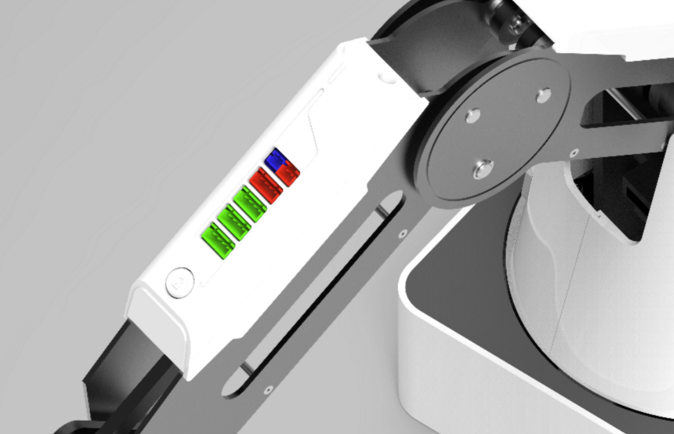
Figura 2.4 - Cambio de color de los puertos en el antebrazo

Figura 2.5 - Puertos V1 (izquierda) frente a puertos V2 (derecha) en la base (dentro del marco rojo)

Figura 2.6 - Puertos V1 (izquierda) frente a puertos V2 (derecha) en el antebrazo (dentro del marco rojo)
2.3Mando AcomodidadCcuelgue dev2
El brazo trasero de la versión V1 y el antebrazo están conectados por una biela. La versión V2 está optimizada para el diseño estructural y se cambia a un rodamiento más una biela, lo que mejora la precisión y consistencia de la trayectoria del brazo robótico, incluido el grabado láser, la escritura y el dibujo.
3.Descripción de la diferencia
3.1DiferenciaBalgoV1yv2

3.1.1multiplexado E/SInterfaz
El número total de interfaces de E/S de DOBOT Magician V1 y V2 sigue siendo el mismo, mientras que las funciones de las interfaces de E/S multiplexadas específicas difieren en las diferentes versiones. Los cambios detallados para la interfaz de E/S multiplexada en el antebrazo, el periférico base y el UART se muestran en las siguientes imágenes, respectivamente. Azul significa que la función es compatible con V1 y V2; gris significa que solo es compatible con V1. Sin subtítulos significa que no hay cambios para la función multiplexada.
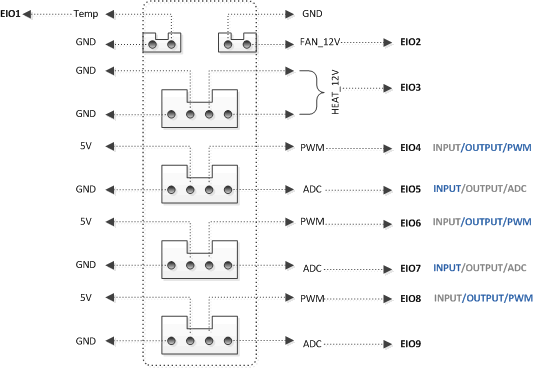
Figura 3.1 - Interfaz de periféricos en el antebrazo
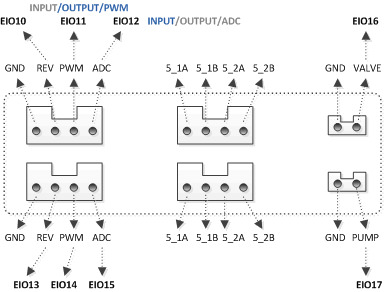
Figura 3.2 - Interfaz de periféricos base
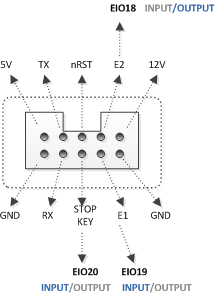
Figura 3.3 - Interfaz UART base
3.1.2Otro Ddiferencias
Tabla 3.1 - Magician V1 vs V2
|
Versión V2
|
Versión V1
|
Cambiar
|
|
El interruptor de retorno de riel se conectaGP2
|
El interruptor de retorno de riel se conecta10 pinespuerto
|
Se actualizó el hardware y se limitaron los usos de algunos puertos para proteger el dispositivo.
|
|
La herramienta de nivelación automática se conectaGP4
|
La herramienta de nivelación automática se conectaGP3
|
|
Selecciones de controlador de puerto USB a serieCP210x
|
Selecciones de controlador de puerto USB a serieCH340
|
Reemplazó el chip del puerto serie
|
|
Los puertos tienendiferentes colores según su tipo
|
Todos los puertostener el mismo color
|
Más fácil de distinguir las interfaces y evitar una conexión incorrecta
|
3.2PAGfotoeléctricoSensorComparación
Tabla 3.2 - Sensor fotoeléctrico V1 vs V2
|
Sensor fotoeléctrico V2
|
Sensor fotoeléctrico V1
|
Cambiar
|
|
ConectaGP1,GP4,GP5
|
ConectaGP1,GP2,GP4,GP5
|
Se modificó la función del puerto 4PIN
|
3.3sensor de colorComparación
Aunque las versiones V1 y V2 de la interfaz de conexión del sensor de color no han cambiado, la forma en que el sensor de color reconoce los cambios de color.
Tabla 3.3 - Sensor de color V1 frente a V2
|
Sensor de color V2
|
Sensor de color V1
|
Cambiar
|
|
El sensor de color identifica el color mediantecomunicacióninterfaz
|
El sensor de color identifica el color medianteinterfaz de E/S
|
Se modificó la función del puerto 4PIN
|
3.4Juego de rielesComparación
Tabla 3.4 - Kit de rieles V1 vs V2
|
RailV2
|
Carril V1
|
Cambios
|
|
El interruptor de retorno de riel conecta 4ALFILERpuerto
|
El interruptor de retorno de riel se conecta10 pinespuerto
|
Se actualizó el hardware y se limitaron los usos de algunos puertos para proteger el dispositivo.
|
4.Compatibilidad
4.1Conexión
DOBOT Magician admite diferentes versiones de periféricos (kit deslizante, sensor fotoeléctrico, sensor de color). Cuando la versión DOBOT Magician es diferente de la versión periférica, las descripciones de conexión son las siguientes.
4.1.1Interruptor de retorno de riel
Tabla 4.1 - Compatibilidad Descripción
|
Versión Magician
|
Versión de riel
|
Puerto de conexión del interruptor de retorno de riel
|
|
v2
|
V1
|
GP2 (se necesita un latiguillo para conectar)
|
|
V1
|
v2
|
GP2
|
- Cuando el usuario controla el riel a través deen bloque,se debe seleccionar la versión correspondiente del riel.
- Si la versión del kit de rieles es V2, debe seleccionar "Nuevo riel" en "Configuración > General" de la interfaz de DobotStudio al controlar el brazo robótico a través de DobotStudio.
4.1.2PAGfotoeléctricoSensor
Tabla 4.2 - Compatibilidad Descripción
|
Versión Magician
|
Versión de sensor fotoeléctrico
|
Puerto de conexión del sensor fotoeléctrico
|
|
v2
|
V1
|
Conecte GP1/GP4/GP5 a través de un puente de cable
|
|
V1
|
v2
|
GP1/GP2/GP4/GP5
|
Método de puente: tome la interfaz GP1 como ejemplo. El sensor fotoeléctrico es activado por I/O 11 INPUT. Para la versión V2 del brazo robótico, la función de multiplexación de E/S cambia. La E/S 11 no tiene función de ENTRADA, pero la E/S 12 admite la ENTRADA, por lo que el sensor fotoeléctrico debe conectarse al pin de la E/S 11 para acceder manualmente a la E/S 12.
Cuando el usuario configura la interfaz del sensor fotoeléctrico a través deen bloques, debe seleccionar la versión correspondiente al sensor fotoeléctrico y seleccionar el puerto de conexión apropiado.
4.1.3sensor de color
Tabla 4.3 - Compatibilidad Descripción
|
Versión Magician
|
Versión del sensor de color
|
Puerto de conexión del sensor de color
|
|
v2
|
V1
|
GP2
|
|
V1
|
v2
|
GP1/GP2/GP4/GP5
|
Cuando el usuario configura la interfaz del sensor fotoeléctrico a través deen bloques, debe seleccionar la versión correspondiente al sensor de color y seleccionar el puerto de conexión apropiado.
4.2APICambios
Los sensores fotoeléctricos, los sensores de color y los kits de rieles vienen en diferentes versiones. Para permitir que el brazo robótico admita diferentes versiones de los periféricos, la interfaz API correspondiente también ha cambiado, la interfaz específica es la siguiente.
- El número de versión debe configurarse al habilitar el riel.
Tabla 4.4 - Establecer el estado del riel
|
prototipo
|
int SetDeviceWithL(bool isEnable, bool isQueued, uint64_t *queuedCmdIndex, uint8_t versión)
|
|
función
|
Establecer el estado del carril. Si usa un kit de rieles, debe llamar a esta API
Antes de enviar las instrucciones relacionadas con el riel deslizante, se debe configurar el estado del riel deslizante.
|
|
parámetro
|
isEnable: 1, inicia el riel. 0, cierre el riel.
isQueued: si agregar esta instrucción a la cola de instrucciones
queuedCmdIndex: si elige poner en cola la instrucción, indica el número de índice de la instrucción en la cola. De lo contrario, este parámetro no tiene sentido.
versión: número de versión del carril. 0: V1; 1: V2
|
|
devolver
|
DobotCommunicate_NoError: instrucción devuelta normalmente
DobotCommunicate_BufferFull: la cola de instrucciones está llena
DobotCommunicate_Timeout: sin retorno de instrucción, tiempo de espera resultante
|
- El número de versión debe configurarse al habilitar el sensor fotoeléctrico y seleccionar el puerto apropiado de acuerdo con la tabla a continuación.
Tabla 4.5 - Habilitar sensor fotoeléctrico
|
prototipo
|
int SetInfaredSensor(habilitar bool, puerto infrarrojo puerto infrarrojo, versión uint8_t)
|
|
función
|
Habilitar sensor fotoeléctrico
|
|
parámetro
|
Definición de puerto infrarrojo:
enum puerto infrarrojo{
SI_PUERTO_GP1;
SI_PUERTO_GP2;
SI_PUERTO_GP4;
SI_PUERTO_GP5;
};
habilitar: estado. 0: no habilitado; 1, habilitado
puerto infrarrojo: puerto en el que el sensor fotoeléctrico está conectado al robot, seleccione la interfaz correspondiente
versión: número de versión del sensor fotoeléctrico. 0: V1; 1: V2
|
|
devolver
|
DobotCommunicate_NoError: instrucción devuelta normalmente
DobotCommunicate_Timeout: sin retorno de instrucción, tiempo de espera resultante
|
- El número de versión debe configurarse al habilitar la interfaz del sensor de color y seleccionar el puerto apropiado de acuerdo con la tabla a continuación.
Tabla 4.6 - Activar sensor de color
|
prototipo
|
int SetColorSensor (habilitar bool, ColorPort colorPort, versión uint8_t)
|
|
función
|
Habilitar sensor de color
|
|
parámetro
|
Definición de puerto de color:
enumerar ColorPort {sss
SI_PUERTO_GP1;
SI_PUERTO_GP2;
SI_PUERTO_GP4;
SI_PUERTO_GP5;
};
habilitar: estado. 0: no habilitado; 1, habilitado
colorPort: puerto en el que el sensor de color está conectado al robot, seleccione la interfaz correspondiente
versión: número de versión del sensor de color. 0: V1; 1: V2
|
|
devolver
|
DobotCommunicate_NoError: instrucción devuelta normalmente
DobotCommunicate_Timeout: sin retorno de instrucción, tiempo de espera resultante
|