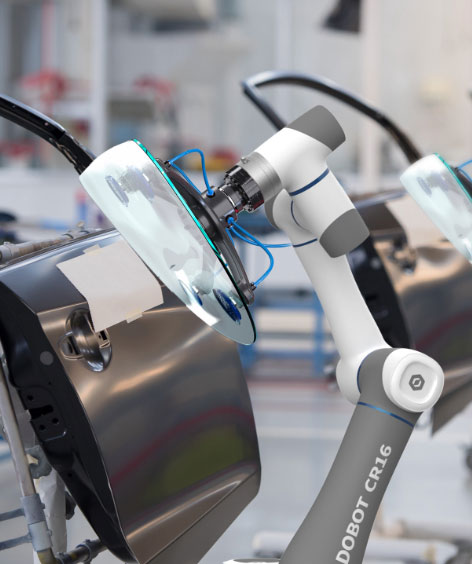
Postura de ajuste automático para una fuerza de pulido uniforme
Impulsados por la tecnología de control de fuerza adaptable líder de Dobot, los cobots ajustan automáticamente las posturas de acuerdo con las superficies objetivo para una fuerza de pulido constante. Si se mueve la superficie objetivo, los cobots pueden detectar la nueva posición de la superficie y seguir aplicando la misma fuerza. Esto asegura un proceso de pulido eficiente y una calidad resultante consistente.

Proceso de instalación simplificado para una configuración más rápida
En comparación con las estaciones de pulido tradicionales, nuestra solución de pulido adaptativo no requiere que los objetos objetivo se coloquen con precisión. Esto simplifica enormemente los equipos involucrados y acorta el tiempo de implementación.

Menos restricciones conducen a escenarios más aplicables
El pulido adaptativo de Cobot se puede aplicar a objetos con superficies complicadas, incluso cuando los objetos están en movimiento. Los cobots pueden rastrear con precisión el objeto en movimiento y aplicar una fuerza de pulido constante, lo que no es posible con el trabajo manual.

<div class="cased-project"><h3 class="comm-title fz-30">Introducción al proyecto</h3><div class="comm-desc fz-16 mt-30"><p> El pequeño laboratorio de robots de la Universidad de Minería y Tecnología de China se construyó con éxito después de tres años con una inversión total de más de 1 millón de yuanes con el financiamiento de la marca principal de la provincia de Jiangsu y los fondos de construcción de la nueva especialidad de robótica de la Universidad de Minería y Tecnología de China. Tecnología.</p><p></p><p> Ahora es principalmente para 60 estudiantes universitarios con especialización en ingeniería robótica para ofrecer cursos de robótica básica, dinámica y control de robots, y diseño y aplicación de sistemas de robots. Al mismo tiempo, también llevó a cabo una formación integral en el campus para 30 estudiantes destacados de la carrera de ingeniería mecánica,</p><p></p><p> y llevó a cabo proyectos del plan Dachuang para más de 1400 estudiantes universitarios en cuatro grados de ingeniería mecánica, que fueron muy populares entre los estudiantes. Sin embargo, actualmente existen algunas dificultades, principalmente porque los estudiantes no dominan el conocimiento profesional de los principios de control de robots y el software operativo relacionado, y necesitan proporcionar práctica con equipos reales para que los estudiantes puedan comprender y dominar mejor los conocimientos y operaciones relacionados, como Modelo DH, soluciones de cinemática directa e inversa, control de brazo robótico, etc., para lograr la combinación mutua de teoría y práctica.</p></div></div><div class="line-bg mt-70"></div><div class="mt-70"><h3 class="comm-title fz-30"> Problema resuelto</h3><div class="comm-desc fz-16 mt-30"><p> <strong><i>1.</i></strong> El sistema de manipulación y clasificación de la cinta transportadora se simula en base al brazo mecánico DOBOT Magician: permita que los estudiantes se acerquen a los robots industriales con varios grados de libertad y estimule el amor y el interés de los estudiantes por los robots simulando la identificación, clasificación y transmisión de robots en la producción real;</p><p></p><p> <strong><i>2.</i></strong> Basado en el sistema de escritura de caracteres de la pista deslizante del brazo mecánico del Magician DOBOT: permita que los estudiantes experimenten que el robot se puede conectar con la vida real de la conveniencia, permita que la mayoría de los estudiantes aprendan más ampliamente el conocimiento del robot;</p><p></p><p> <strong><i>3.</i></strong> Sistema de clasificación de módulos visuales basado en el brazo mecánico DOBOT Magician: brinde a los estudiantes la oportunidad de aprender identificación visual avanzada y otros campos, para que los estudiantes en la etapa de pregrado exploren un poder más innovador;</p><p></p><p> <strong><i>4.</i></strong> Basado en DOBOT M1 + AGV sistema de navegación de figuras integrado: utilizando el enlace del sistema ROS, el brazo mecánico, el radar, la navegación, el mapa compuesto de tecnologías avanzadas como el modelado, pertenece al campo avanzado, en el desarrollo nacional en este campo es fuerte, puede, de acuerdo con el interés de los estudiantes en la libertad de elegir el modo de desarrollo, puede ejercitar más profundamente la capacidad de programación, depuración e instalación de los estudiantes.</p></div></div>
1040*280
<a href="/about/contact-us#contact" class="industry-other bg-cover mt-100" style="background-image: url(/themes/en/default/upload/industrial/talk-to-dobot-experts-1.jpg);margin-top:60px;">
</a>
<a href="/about/contact-us#contact">
<div class="pd-apply bg-cover js-response-bg" style="height:280px;margin-top: 100px;" data-pc="/themes/en/default/upload/industrial/talk-to-dobot-experts-1.jpg" data-m="/themes/en/default/upload/industrial/application_pageM.jpg"></div>
</a>